ADELPHI, Md. - The future battlefield will rely on teams of air-and ground-based autonomous agents operating mission-to-mission with no Soldier intervention.
Army researchers have developed a unique approach that allows a rotary wing unmanned air vehicle to land on a moving unmanned ground vehicle without the aid of GPS and recharge before moving on to the next mission.
Teams of autonomous air and ground agents will enable operations in search and rescue environments that are too remote or dangerous for humans, but often require extensive positioning and communication infrastructure, said Army researcher Dr. Stephen Nogar of the U.S. Army Combat Capabilities Development Command, known as DEVCOM, Army Research Laboratory.
“UAVs will need the ability to operate with no Soldier intervention, and a critical function is landing autonomously on static and moving ground vehicles, recharging, then taking off to perform new missions,” Nogar said. “Additionally, UAVs will not be able to rely on GPS, as it is unreliable and easily disrupted, so these behaviors will need to be performed using other sources such as onboard vision.”
Nogar and fellow researchers from the lab developed a straightforward approach that maximizes the use of modern robotics tools to achieve a rotary wing UAV landing on a moving UGV without the aid of external positioning systems.
As part of the International Symposium on Safety, Security, and Rescue Robotics, the IEEE recently published the research.
Researchers performed all of the computations onboard the vehicle using low-cost sensors and computers. Also, no communications occured between the UAV and UGV.

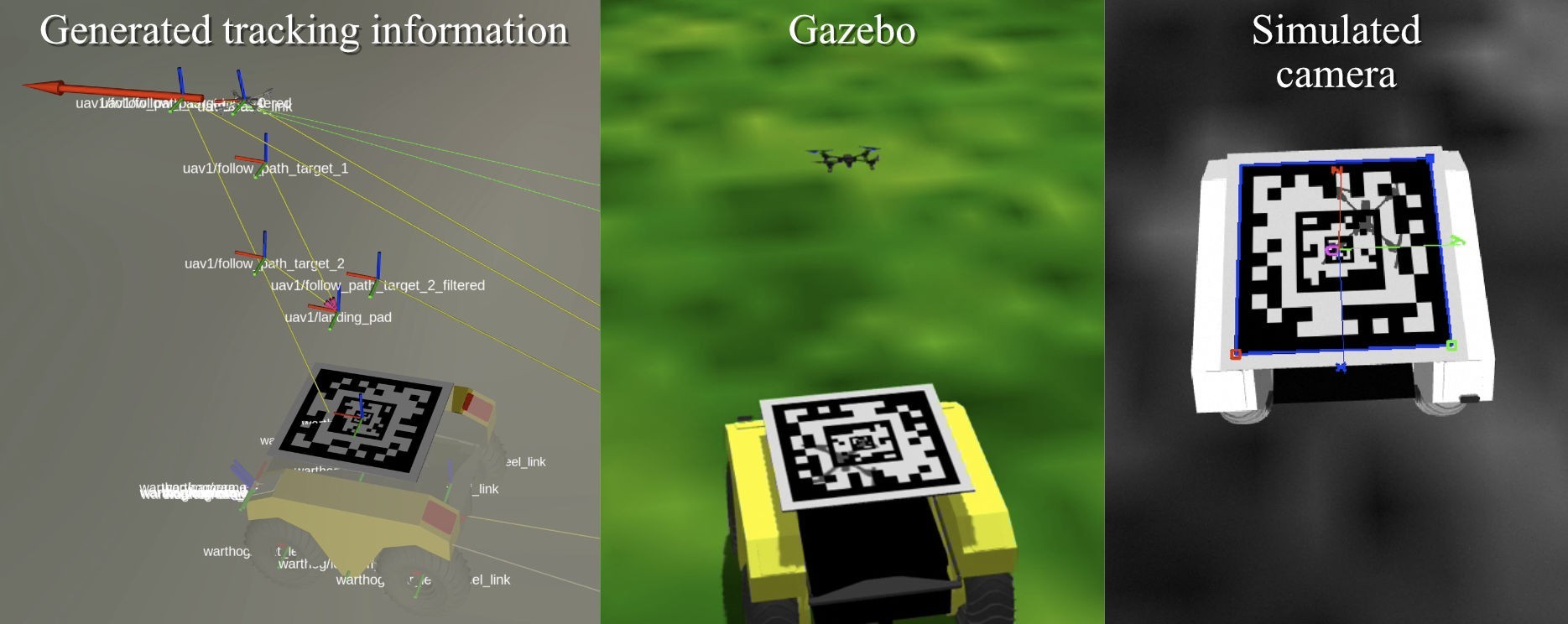
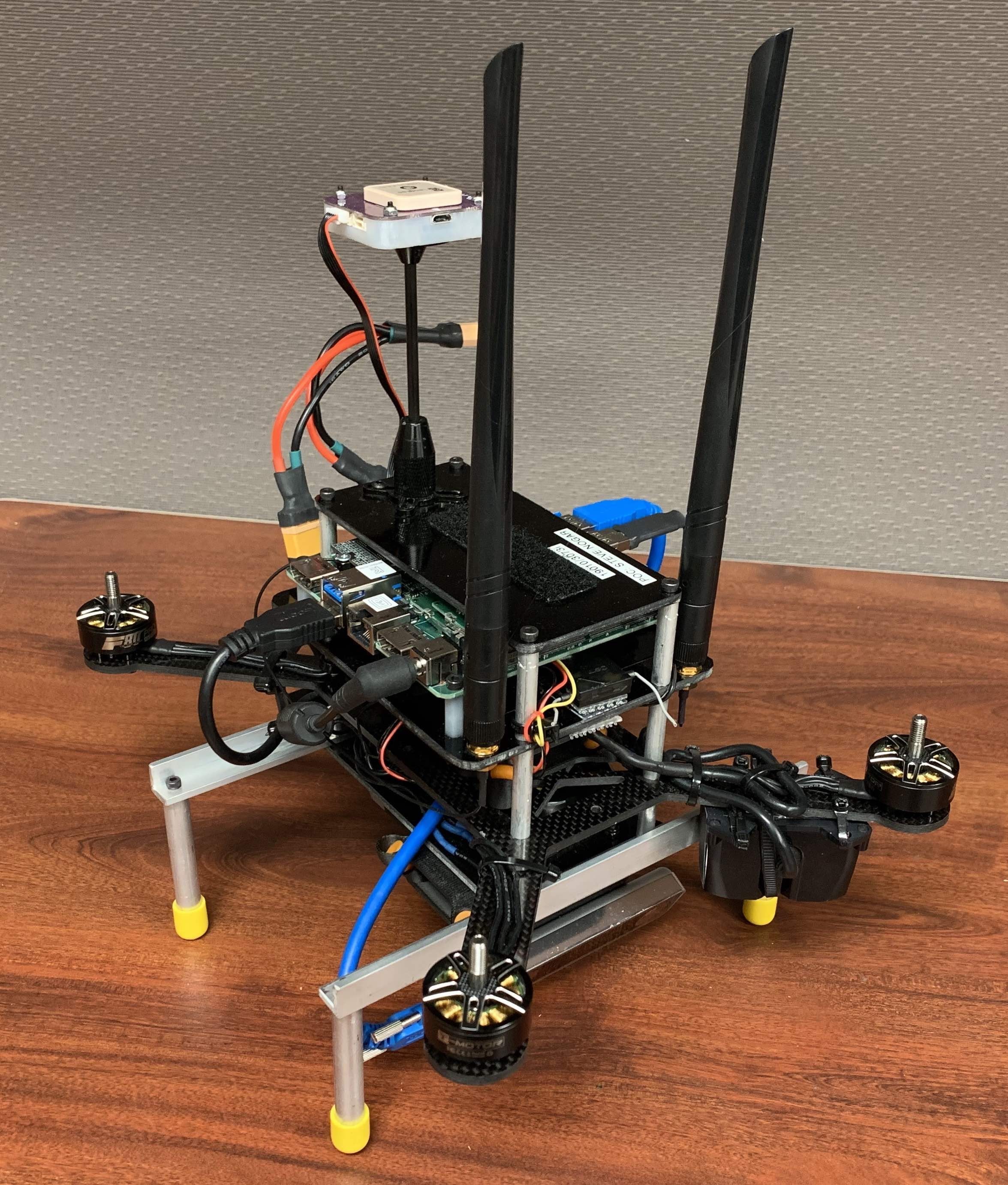
The team conducted both software-in-the-loop simulations and outdoor experiments, and demonstrated the algorithm to be effective at performing landing maneuvers. Using a small custom-built quadrotor and a Clearpath Warthog UGV at jogging speeds, the researchers experimented with landings.
“This work combines GPS denied behaviors and an experimentally proven behavior that is rare in academia or industry,” Nogar said. “It combines several cutting-edge areas such as vision-based localization using visual-inertial odometry, a unique marker on top of the ground vehicle designed for this application and onboard behaviors and control. Additionally, these are all performed onboard a small UAS with significant computational constraints.”
According to Nogar, what makes this research unique is the practical demonstration of this task outdoors, without GPS, using the computing power onboard the UAS. Other work in this area often relies on some or all of these factors being less constrained.
Additionally, he said, this project uses a custom marker on top of the ground vehicle that is specifically designed for the landing task. It contains smaller markers within the bigger marker that can still be viewed even as the camera approaches the marker.

Looking to the future, work in this area continues in two main areas:
- Reducing dependence on the fiducial marker on top of the ground vehicle and replacing it with artificial intelligence that recognizes the vehicle it wants to land on
- Improving the reliability and speed of the landing such that it can be used to meet appropriate op-tempo requirements
“Autonomous landing is critical to making UAVs useful on the future battlefield,” Nogar said. “For instance, the Next Generation Combat Vehicle is expected to have a UAV paired with it. Within the lab, several projects are using this capability as part of more complex behaviors.”
Visit the laboratory's Media Center to discover more Army science and technology stories

DEVCOM Army Research Laboratory is an element of the U.S. Army Combat Capabilities Development Command. As the Army’s corporate research laboratory, ARL is operationalizing science to achieve transformational overmatch. Through collaboration across the command’s core technical competencies, DEVCOM leads in the discovery, development and delivery of the technology-based capabilities required to make Soldiers more successful at winning the nation’s wars and come home safely. DEVCOM is a major subordinate command of the Army Futures Command.
Social Sharing